5.1 Methods
5.1.1 Empirical techniques
Early on, the first empirical methods proved extremely
powerful despite their simplicity (see e.g. Connolly
et al. 1995a; Brunner et al. 1997; Wang, Bahcall, and
Turner 1998). This was partly due to their construction,
which should provide both accurate redshifts and realistic
estimations of the redshift uncertainties. Even low-order
polynomial and piecewise linear fitting functions do a
reasonable job when tuned to reproduce the redshifts
of galaxies (see e.g. Connolly et al. 1995a). These
early methods provided superior redshift estimates in
comparison to template-fitting for a number of reasons. By
design the training sets are real galaxies, and thus suffer no
uncertainties of having accurate templates. Similarly as the
galaxies are a subsample of the survey, the method
intrinsically includes the effects of the filter bandpasses and
flux calibrations
One of the main drawbacks of this method is that the
redshift estimation is only accurate when the objects in the
training set have the same observables as the sources in
question. Thus this method becomes much more uncertain
when used for objects at fainter magnitudes than the
training set, as this may extrapolate the empirical
calibrations in redshift or other properties. This also
means that, in practice, every time a new catalogue
is created, a corresponding training set needs to be
compiled.
The other, connected, limitation is that the training
set must be large enough that the necessary space
in colours, magnitudes, galaxy types and redshifts
is well covered. This is so that the calibrations and
corresponding uncertainties are well known and only
limited extrapolations beyond the observed locus in
colour-magnitude space are necessary.
The simplest and earliest estimators were linear and
polynomial fitting, where simple fits of the empirical
training set in terms of colours and magnitudes with
redshift were obtained (see e.g. Connolly et al. 1995a).
These could then be matched to the full sample, giving
directly the redshifts and their uncertainties for the
galaxies. Since then further, more computational intensive
algorithms, have been used, such as oblique decision tree
classification, random forests, support vector machines,
neural networks, Gaussian process regression, kernel
regression and even many heuristic homebrew algorithms.
These algorithms all work on the idea of using the
empirical training set to build up a full relationship
between magnitudes and/or colours and the redshift. As
each individual parameter (say the B -V colour) will have
some spread with redshift, these give distributions or
probabilistic values for the redshift, narrowed with each
additional parameter. This process, in terms of artificial
neural networks, is nicely described by Collister and
Lahav (2004), who use this method in their publicly
available photo-z code ANNz (described in the same
paper). They also discuss the limitations and uncertainties
that arise from this methodology.
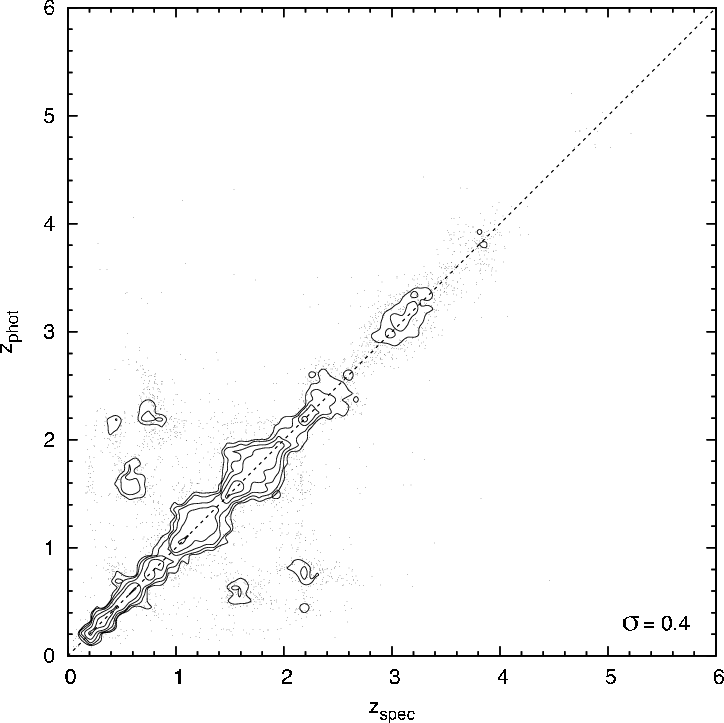
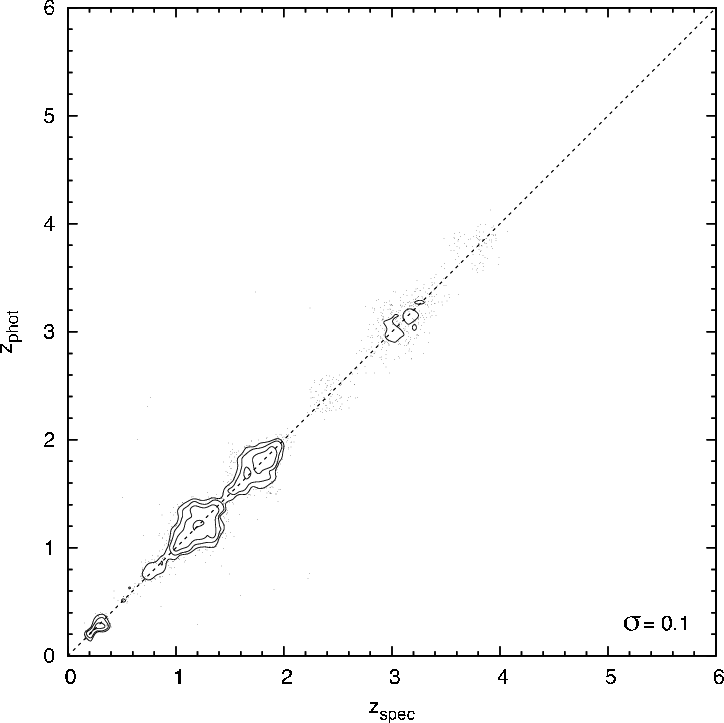
Machine learning algorithms (of which neural networks
is one) are one of the strengths of the empirical method.
These methods are able to determine the magnitude/colour
and redshift correlations to a surprising degree, can handle
the increasingly large training sets (i.e. SDSS) and return
strong probabilistic estimates (i.e. well constrained
uncertainties, see figure 16) on the redshifts (see Ball
et al. 2008a, for a description of machine learning
algorithms available and the strong photo-z constraints
possible). In addition, machine learning algorithms are also
able to handle the terascale datasets now available for
photo-z determination rapidly, limited only by processor
speed and algorithm efficiency (Ball, Loveday, and
Brunner 2008b).
The additional benefit of the empirical method with
machine learning, now increasingly being used, is that the
constraining inputs for the photo-zs are not limited to the
galaxies SED. Suggested first by Koo (1999), properties
such as the the bulge-to-total flux ratio (e.g. Sarajedini
et al. 1999), surface brightness (e.g. Kurtz et al. 2007),
petrosian radii (e.g. Firth, Lahav, and Somerville 2003),
and concentration index(e.g. Collister and Lahav 2004)
have all been used in association with the magnitudes and
colours to constrain the redshift, some codes even bringing
many of these together (e.g. Wray and Gunn 2008).
5.1.2 Template Fitting
Unlike the empirical method, the template-based method
is actually a form of SED fitting in the sense of this
review (see e.g. Koo 1985; Lanzetta, Yahil, and
Fernández-Soto 1996; Gwyn and Hartwick 1996; Pello
et al. 1996; Sawicki, Lin, and Yee 1997). Put simply, this
method involves building a library of observed (Coleman,
Wu, and Weedman 1980, is a commonly used set) and/or
model templates (such as Bruzual and Charlot 2003) for
many redshifts, and matching these to the observed SEDs
to estimate the redshift. As the templates are “full”
SEDs or spectra, extrapolation with the template
fitting method is trivial, if potentially incorrect. Thus
template models are preferred when exploring new
regimes in a survey, or with new surveys without a
complementary large spectroscopic calibration set.
A major additional benefit of the template method,
especially with the theoretical templates, is that obtaining
additional information, besides the redshift, on the
physical properties of the objects is a built-in part of the
process (as discussed in section 4.1). Note though, that
even purely empirical methods can predict some of these
properties if a suitable training set is available (see
e.g. Ball et al. 2004).
However, like empirical methods, template fitting
suffers from several problems, the most important being
mismatches between the templates and the galaxies of the
survey. As discussed in section 2, model templates, while
good, are not 100% accurate, and these template-galaxy
colour mismatches can cause systematic errors in the
redshift estimation. The model SEDs are also affected by
modifiers that are not directly connected with the
templates such as the contribution of emission lines,
reddening due to dust, and also AGN, which require
adapted templates (see e.g. Polletta et al. 2007; Assef
et al. 2010).
It is also important to make sure that the template set
is complete, i.e. that the templates used represent all, or
at least the majority, of the galaxies found in the survey (compare also Section 4.5.2). This is especially true when
using empirical templates, as these are generally limited in
number. Empirical templates are also often derived from
local objects and may thus be intrinsically different from
distant galaxies, which may be at different evolutionary
stage. A large template set is also important to gauge
problems with degeneracies, i.e. where the template
library can give two different redshifts for the same input
colours. Another potential disadvantage of template fitting
methods comes from their sensitivity to many other
measurements to about the percent level, e.g., the
bandpass profiles and photometric calibrations of the
survey.
For implementations of the template fitting, the method
of maximum likelihood is predominant. This usually
involves the comparison of the observed magnitudes
with the magnitudes derived from the templates at
different redshifts, finding the match that minimizes the
χ2 (compare section 4.5). What is returned is the
best-fitting (minimum χ2) redshift and template (or
template+modifiers like dust attenuation). By itself this
method does not give uncertainties in redshift, returning
only the best fit. For estimations of the uncertainties in
redshift, a typical process is to propagate through the
photometric uncertainties, to determine what is the range
of redshifts possible within these uncertainties. A good
description of the template-fitting, maximum likelihood
method can be found in the description of the publicly
available photo-z code, hyperz in Bolzonella, Miralles, and
Pelló (2000).
As mentioned above, one of the issues of the templates
is the possibility of template incompleteness, i.e. not
having enough templates to describe the galaxies in the
sample. Having too many galaxies in the template
library on the other hand can lead to colour-redshift
degeneracies. One way to overcome these issues is
through Bayesian inference: the inclusion of our prior
knowledge (see Section 4.5), such as the evolution of
the upper age limit with redshift, or the expected
shape of the redshift distributions, or the expected
evolution of the galaxy type fractions. As described in
Section 4.5, this has the added benefit of returning a
probability distribution function, and hence an estimate of
the uncertainties and degeneracies. In some respects,
by expecting the template library to fit all observed
galaxies in a survey, the template method itself is
already Bayesian. Such methods are used in the BPZ
code of Benítez (2000), who describes in this work
the methodology of Bayesian inference with respect
to photo-z, the use of priors and how this method
is able to estimate the uncertainty of the resulting
redshift.
It should be noted that, while public, prepackaged
codes might provide reasonable estimates for certain
types of sources, no analyses should proceed without
cross-validation and diagnostic plots. There are common
problems that appear in data sets and issues that need to
be understood first, and worked around, if possible
(see e.g. Mandelbaum et al. 2005, for a comparison
of some public photo-z codes). Some further public
photo-z codes include kphotoz (Blanton et al. 2003),
zebra (Feldmann et al. 2006), Le Phare (Arnouts
et al. 1999; Ilbert et al. 2006, 2009a) and the code by
Assef et al. (2008).